
Open Source Mapping Robot
I am currently building this robot so that I can play around with various mapping, navigation, and perception technologies. It is meant to be an open-source project as well so I have recorded a bunch of videos and published most of the information needed to make one yourself or to modify it to suit your needs. Links to the videos as well as the files necessary to build the robot can be found on this webpage .
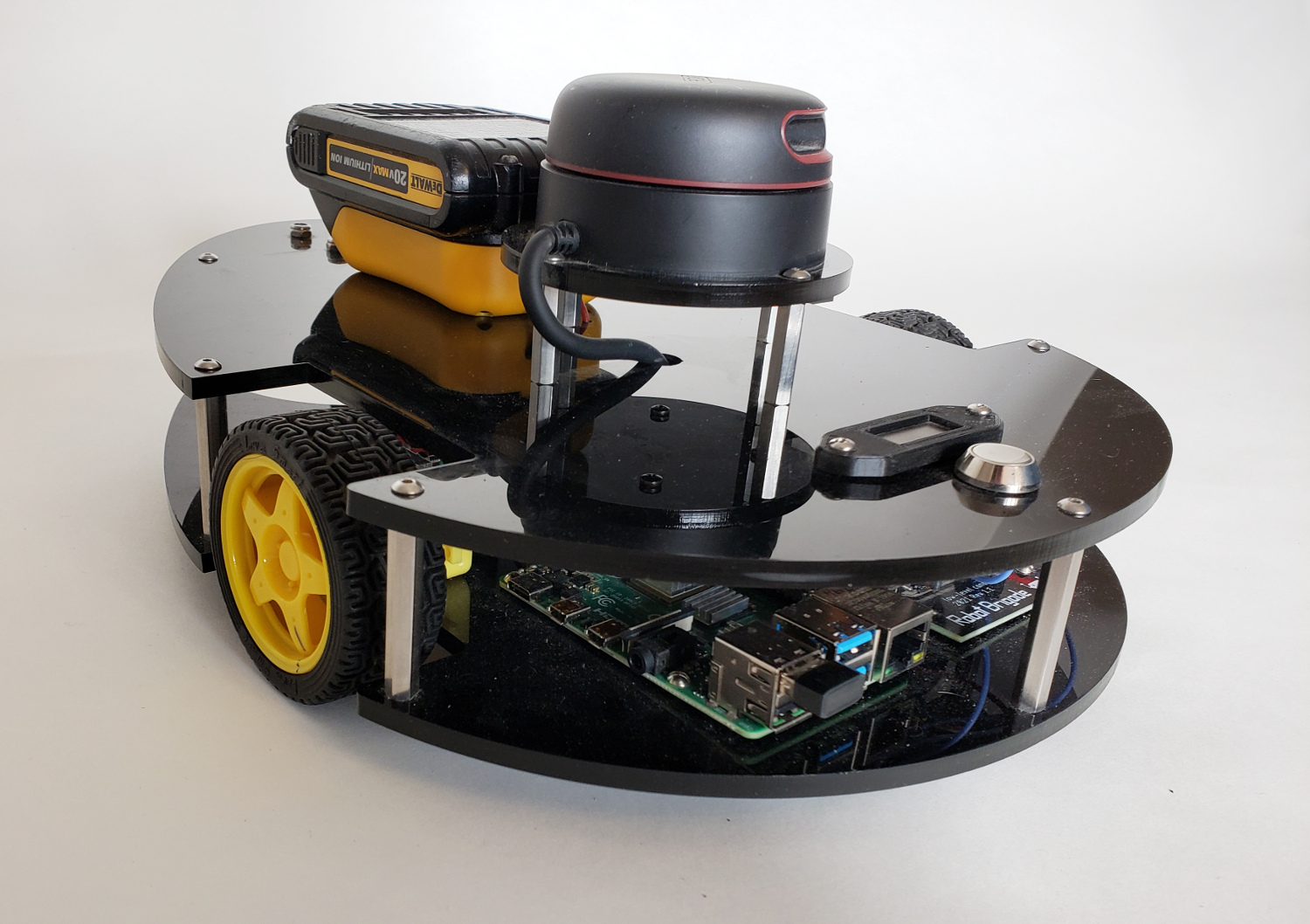
The goals of this project were to build a robot that was small but not so small that it couldn't easily hold both a MCU circuit board as well as a CPU board. It needed to have a RPlidar module attached to the top. I positioned it directly between the wheels so that turning wouldn't change the position of the RPlidar, only its orientation. Although it wasn't an initial goal, it became apparent that I wanted an easily rechargable battery that was also relatively inexpensive. I settled upon using a Dewalt 20V battery pack usually used for cordless power tools as this fit the bill better than having bare batteries. Cost was a consideration with this project so I have tried to keep the price down though I can see that there is still room for improvement. If I could have purchased a kit that met my needs, I would have but there doesn't seem to be much middle ground between small robot kits that are designed to be run by an Arduino and large robot bases that are meant to be used by research institutions.
The current state of this project (04 November 2021) is that the robot is mechanically complete, the low-level microcontroller board is completely functional from an electronic standpoint. It can curently respond to commands for beeping, driving the motors, powering off, displaying text on the OLED display, and reading the battery voltage. I have a ROS2 node that can communicate all of these messages to the MCU board and then receive the replies if there is one. The ROS node will send the messages to the MCU when it receives a message on a topic corresponding to that command eg: driveMotors and it publishes on topics when it receives a message from the MCU eg: batteryVoltage.
At this time, the robot is ready for anyone to jump right in and use it for whatever they want so I have taken the time to document most things so far. Take a look at the page linked to above for more info.

